
Cenni storici.
I sottomarini tedeschi Tipo XXIII furono i primi cosiddetti Elektroboote a diventare operativi. Erano piccoli sottomarini costieri progettati durante la seconda guerra mondiale per operare nelle acque poco profonde del Mare del Nord, del Mar Nero e del Mar Mediterraneo, dove gli U-Boot più grandi erano maggiormente a rischio. Erano così piccoli da poter trasportare solo due siluri, che dovevano essere caricati esternamente. Come con i loro fratelli molto più grandi - gli Elektroboote tipo XXI - erano in grado di rimanere sommersi quasi tutto il tempo ed erano più veloci dei normali U-Boot, grazie al miglioramento della loro forma, alle batterie con maggiore capacità e allo snorkel, che permettva l'utilizzo dei motori diesel anche durante l'immersione. Gli U-Boot tipo XXI e tipo XXIII hanno rivoluzionato il design dei sottomarini del dopoguerra e rappresentano l' anello di congiunzione fra i sommergibili e i sottomarini.
Quando iniziò lo sviluppo con l'U-boat tipo XXI alla fine del 1942, fu proposto di sviluppare contemporaneamente una versione più piccola che incorporasse la stessa tecnologia avanzata per sostituire il sottomarino costiero di Tipo II. L'ammiraglio Karl Dönitz aggiunse due requisiti: poiché il battello avrebbe dovuto operare nel Mediterraneo e nel Mar Nero, doveva essere in grado di essere trasportato su rotaia e doveva utilizzare i tubi lanciasiluri standard da 53,3 cm (21 pollici). Entro il 30 giugno 1943 il progetto era pronto e la costruzione iniziò parallelamente in diversi cantieri navali in Germania, Francia, Italia e nell' Ucraina occupata dai tedeschi. L' appaltatore principale era Deutsche Werft ad Amburgo. Come per il Tipo XXI, il Tipo XXIII doveva essere costruito in sezioni, i vari moduli venivano prodotti da diversi subappaltatori. Alla fine, le circostanze fecero sì che la costruzione fosse concentrata nei cantieri Germaniawerft a Kiel e Deutsche Werft ad Amburgo. Dei 280 sottomarini ordinati, 61 furono costruiti e solo 6 entrarono in servizio.
Il Tipo XXIII aveva un singolo scafo interamente saldato e fu il primo sommergibile ad utilizzare una tale configurazione. Aveva un involucro esterno estremamente idrodinamico e privo di appendici. Il sottomarino era spinto da una singola elica a tre pale e aveva un singolo timone. Per consentirne il trasporto su rotaia, le sezioni dello scafo dovevano essere di dimensioni limitate per adattarsi allo sagoma d'ingombro della ferrovia. A causa delle limitazioni di spazio, vennero montati solo due tubi lanciasiluri e non potevano essere trasportati siluri di scorta. I siluri vennero caricati facendo zavorrare il sommergibile a poppa in modo che la prua si sollevasse dall'acqua e che i siluri potessero essere caricati direttamente nei loro tubi da una chiatta. Il Tipo XXIII dimostrò di avere eccellenti caratteristiche di maneggevolezza ed fu altamente manovrabile sia in superficie che sott'acqua. Il tempo di immersione era di 9 secondi e la sua profondità massima era di 180 m. La velocità in immersione di 12,5 nodi (23,2 km / h, 14,4 miglia all'ora), mentre la velocità di superficie era di 9 nodi (17 km / h, 10 mph). Una velocità di 10,5 nodi (19,4 km / h, 12,1 mph) poteva essere raggiunta a quota snorkel.
Nessuno dei sei tipo XXIII divenuti operativi durante la guerra ( U-2321, U-2322, U-2324, U-2326, U-2329 e U-2336) è stato affondato dalle navi degli alleati ma hanno affondato o danneggiato cinque navi per un totale di 14,601 tonnellate. La prima pattuglia di guerra di un tipo XXIII iniziò a guerra quasi finita quando l'U-2324 salpò da Kiel il 18 gennaio 1945. Il primo tipo XXIII a raggiungere il successo in combattimento fu lo U-2322, comandato da Oberleutnant zur See Fridtjof Heckel. Salpato da una base norvegese il 6 febbraio 1945, incontrò un convoglio al largo di Berwick, nel Northumberland, e affondò il mercantile Egholm il 25 febbraio. L'U-2321, operando dalla stessa base, affondò un mercantile il 5 aprile 1945 al largo di St Abbs Head. L'U-2336, sotto il comando del Kapitänleutnant Emil Klusmeier, in seguito affondò il 7 maggio 1945 le ultime navi perse dagli Alleati nella guerra in Europa , quando silurò e affondò i mercantili Sneland e Avondale Park all'interno del Firth of Forth. Lo Sneland e il Avondale Park furono affondati verso le 23:03, meno di un'ora prima della resa ufficiale tedesca, e l'Avondale Park fu l'ultima nave mercantile ad essere affondata da un U-Boot. All'epoca si pensava che Kapitänleutnant Klusmeier, che era alla sua prima pattuglia, avesse deliberatamente ignorato l'ordine di cessate il fuoco di Dönitz; tuttavia, Klusmeier affermò di non aver mai ricevuto l'ordine.
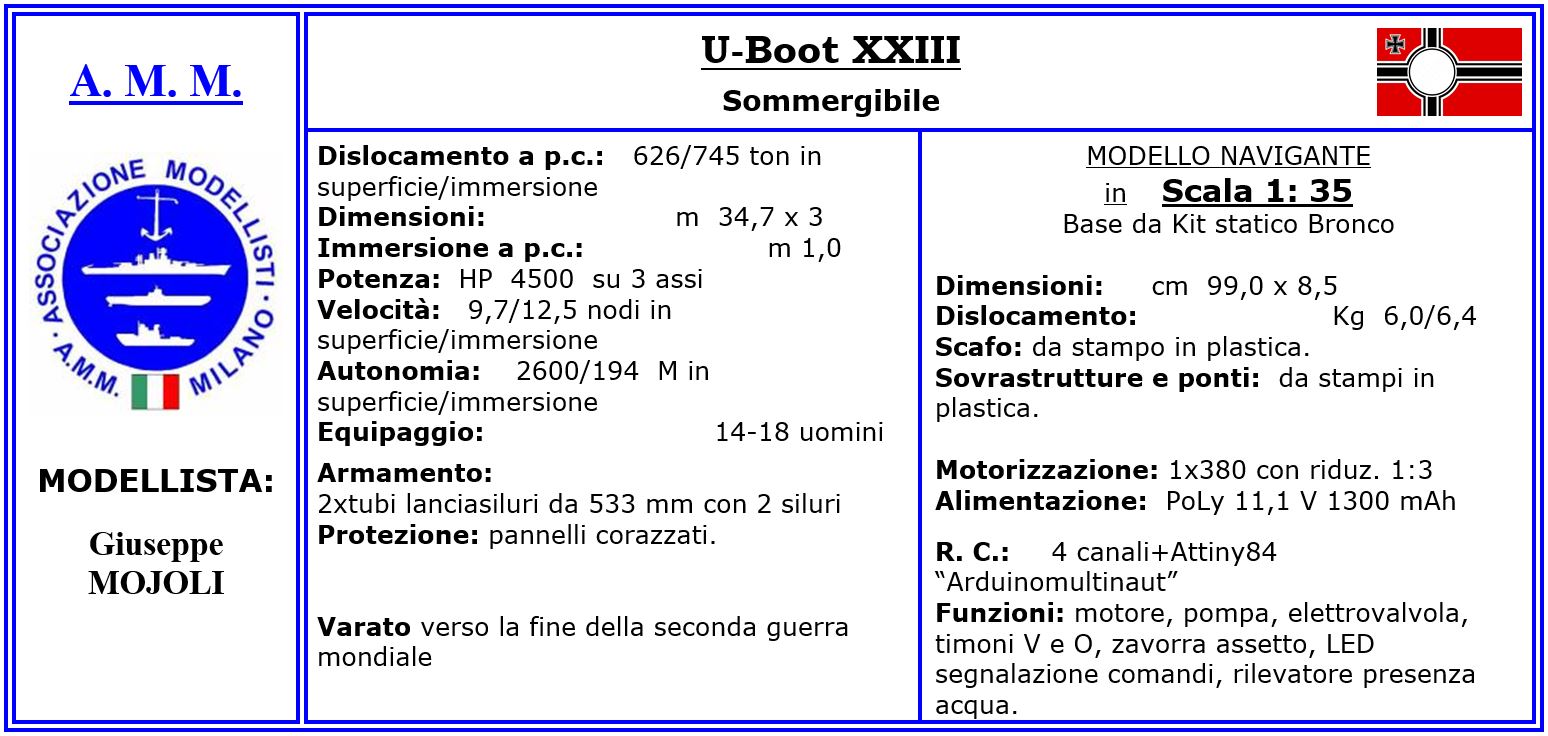
Il modello.
Sono stato a lungo indeciso sul tipo di sistema adottare per l’ immersione statica del battello; ciascuno ha i suoi vantaggi e i suoi svantaggi. Alla fine ho adottato il sistema che prevede il riempimento di una sacca elastica e di una elettrovalvola normalmente aperta che ne impedisce lo svuotamento. In caso di guasto l’ apertura della valvola fa svuotare la sacca e il battello riemerge. Certo che se la pressione esterna è eccessiva non sarebbe proprio così..
Quindi queste sono le funzioni del mio XXIII:
-Canale 1 - Timone di direzione
-Canale 2 - Timoni di profondità di poppa
-Canale 3 - Rotazione e giri motore
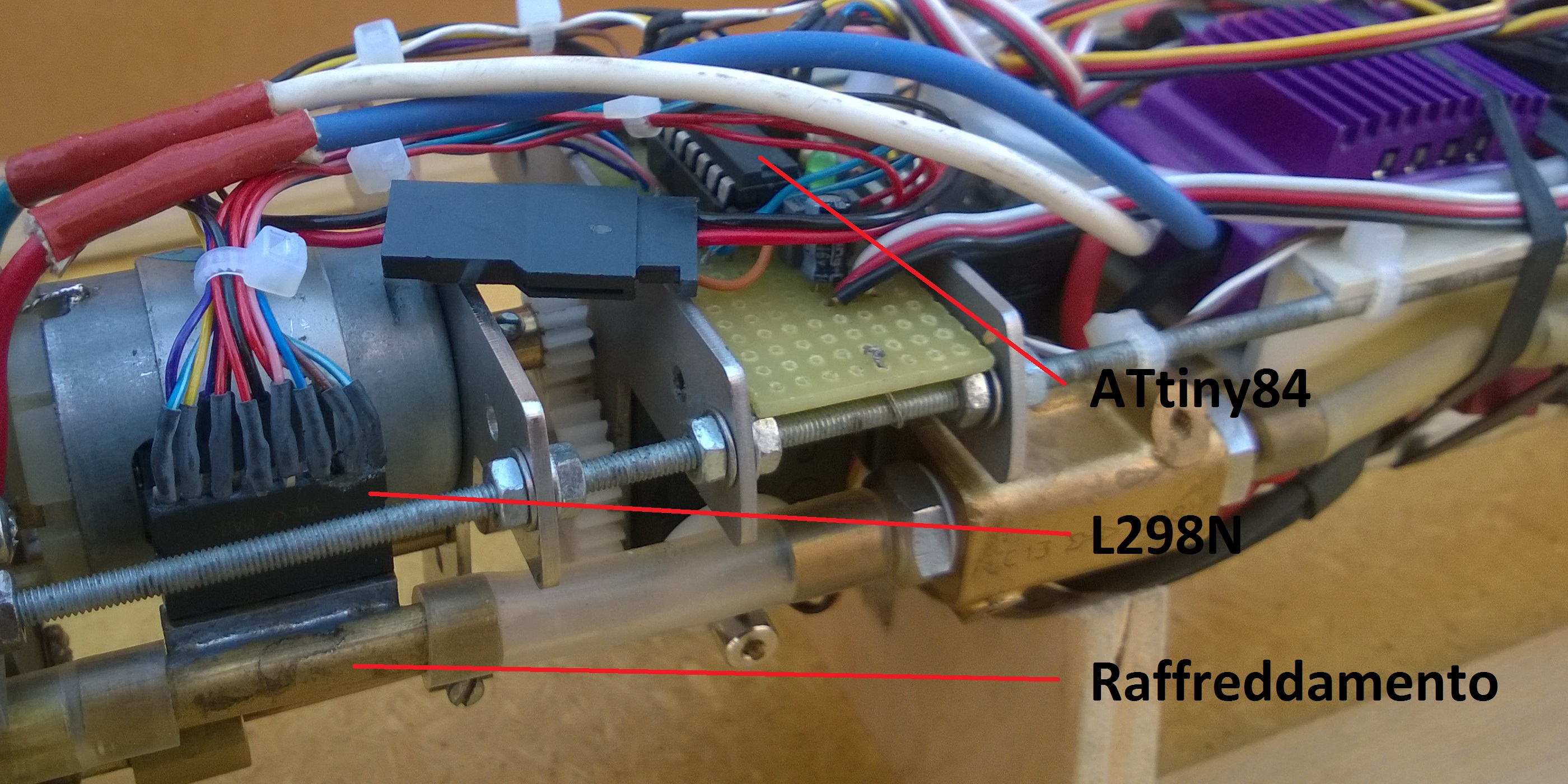
-Canale 4 - Comando Pompa ed elettrovalvola. Mediante trim si può escludere la chiusura dell’ elettrovalvola per la navigazione in emersione (risparmio corrente). Questo canale gestisce un AtTiny84 che in più permette di comandare due led e un sensore di rilevamento presenza acqua a bordo. LED di prua acceso = elettrovalvola chiusa; LED di poppa acceso = pompa in funzione; LEDs lampeggianti=presenza acqua nello scafo. Nel caso di presenza acqua la pompa è inibita all’ imbarco acqua e l’ elettrovalvola si apre.
-Canale 5 - Spostamento di una massa interna prua-poppa per regolazione assetto in immersione
L’ impianto elettrico è a 12V e un Fail Safe blocca la pompa in caso di mancanza del segnale radio. Il motore è ridotto 1:3 mediante ingranaggi Graupner.
Un semplice ATtiny84 e un transistor 298 raffreddato con l'acqua della cassa d'immersione permettono quanto descritto nel paragrafo precedente. Il programma chiarifica bene la logica dei comandi: sinteticamente il circuito legge un canale della ricevete e comanda pompa, elettrovalvola, due LED. Rileva anche la presenza di acqua e attiva una serie di comandi d'"emergenza". Il file è cliccabile qui sotto.
Nelle fotografie successive troverete altre informazioni sul mio U-Bootarduino!