Motore a carboni e magneti permanenti in CC
Le sue grandezze caratteristiche.
I motori a spazzole, cioè i motori "brushed" come si usa chiamarli ora in antitesi ai brushless, sono quelli di più antico utilizzo nel campo del modellismo. Infatti uniscono la facile reperibilità delle sorgenti di alimentazione, a partire dalle “pile” usa e getta, alla semplicità di comando (basta un banale interruttore meccanico).
Attualmente i motori "brushless" si stanno diffondendo rapidamente soprattutto dove sono richieste alte velocità di rotazione e coppie elevate; il modellismo da "riproduzione" ne è quindi solo parzialmente interessato anche se, come anticipa lo U-212 Robbe, probabilmente saranno destinati ad una sempre maggior diffusione.
I valori delle grandezze che definiscono compiutamente da punto di vista dell’ utilizzo un motore n CC sono essenzialmente 4:
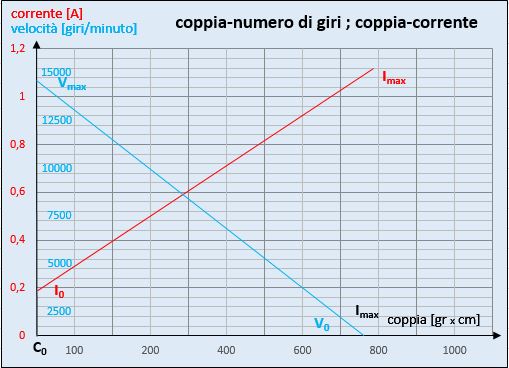
- il numero di giri al minuto che il motore compie senza carico all’ albero: Vmax [giri/min]. Quando V=Vmax, la coppia in uscita C è nulla (V=Vmax; C=0).
- la coppia massima fornita dal motore, cioè la coppia di stallo: Cmax [mN x m; 1 mN m= 10.2 g cm]. Quando C=Cmax, la velocità di rotazione è nulla (C=Cmax; V=0).
- la corrente assorbita a rotore bloccato: Imax [A]. Quando I=Imax abbiamo V=0 ( V=0 ; C= Cmax).
- la corrente assorbita a rotore senza carico all’ albero: Imin [A]. Quando I=Imin abbiamo V=Vmax ( V=Vmax ; C= 0).
Questi quattro punti nei piani cartesiani COPPIA-CORRENTE e COPPIA-NUMERO DI GIRI definiscono univocamente i due segmenti propri delle caratteristiche meccaniche del motore in CC.
Le ulteriori grandezze:
- Potenza meccanica
- Potenza elettrica
- Efficienza
Si ottengono dalle precedenti, cioè numero di giri, corrente e coppia, secondo queste formule:
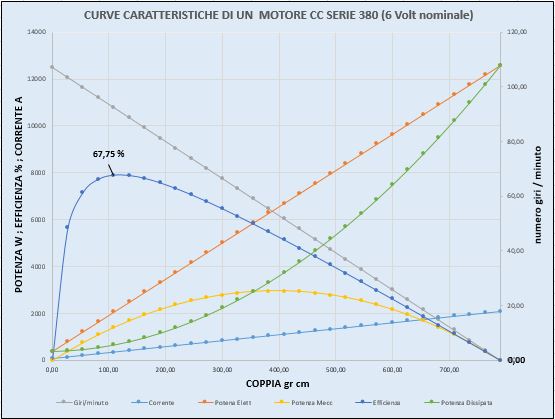
Potenza meccanica Pm = V x C / 9550 [giri/min x mN x m]
Potenza elettrica Pe = V x I [W]
Efficienza = 100 x Pm / Pe [%]
Sempre in riferimento ai due piani cartesiani precedenti, come valutazioni generali inerenti l'utilizzo modellistico possiamo affermare:
- Più il segmento nel piano COPPIA - NUMERO DI GIRI è orizzontale, più la variazione dei giri al minuto è minore al variare della coppia resistente. Il metodo più semplice per rendere la curva più orizzontale è quello di utilizzare un riduttore in uscita all'albero motore.
- Più la corrente assorbita è minore, tanto più aumenterà l’ autonomia di funzionamento e si scalderà meno il motore.
- Generalmente l' efficienza aumenta all’ aumentare della velocita di rotazione e al diminuire della coppia resistente. Ovviamente più il motore è pregiato costruttivamente e ben manotenuto, tanto più l' energia elettrica tenderà a trasformarsi completemante in energia meccanica. Orientativamente l' effiicienza è attorno al 60%.
Prima di entrare in ulteriori dettagli teorici, riporto un paio di semplici esempi che intuitivamente possono facilitare un approccio più formale alle grandezze fisiche in gioco:
Per la mia PTB ho scelto due tipi di elica:
- Tripala diametro 20 mm con passo “corto”.
- Bipala diametro 20mm con passo “lungo”.
Come già accennato nella pagina di presentazione del modello (vedi qui: http://mojolibeppe.altervista.org/ptb-1-35.html ) la bipala rende il modello velocissimo ma provoca anche un elevato surriscaldamento dei motori.
Se volessimo invece che il modello planasse alla corretta velocità in scala (Vptb=74/Radice quadrata 35) dovremo ridurre il numero di giri dell’ elica bipala o portare verso il regime massimo di rotazione l’ elica tripala. A parità di velocità in scala raggiunta, con la tripala andiamo verso la zona di massima efficienza mentre con la bipala dobbiamo sottoalimentare il motore facendolo lavorare inoltre in una zona di scarso rendimento (senza calcolare le dissipazione nel regolatore). Quindi a parità di velocità con la tripala abbiamo più autonomia e minor surriscaldamento dei motori.
Analogamente per la S-100 (vedi qui: http://mojolibeppe.altervista.org/s-100-1-35.html ) a parità di velocità da raggiungere e a parità di eliche montate, è meglio utilizzare dei motori con una riduzione meccanica e alimentati alla tensione nominale piuttosto che usare gli stessi motori in presa diretta e sottoalimentatati.
Torniamo però ai nostri due simpatici segmenti: le loro posizioni cambiano, pur non intervenendo sui materiali e sulle geometrie costruttive dei motori stessi, nello spazio in base ad una serie di fattori “esterni”. Tipicamente:
- Tensione di alimentazione V
- Resistenza interna del sistema di alimentazione OhM
- Rapporto di riduzione
- Temperatura del motore
- Presenza dell’ anello limitatore di flusso
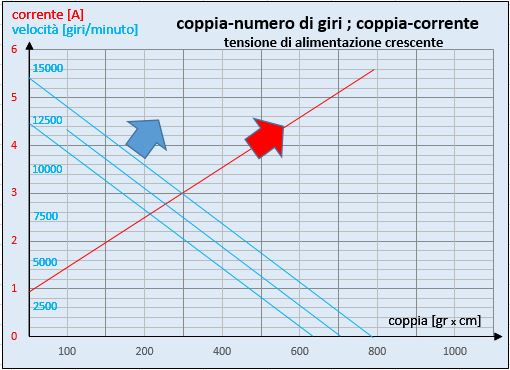
Tensione di alimentazione.
I segmenti del piano COPPIA-NUMERO DI GIRI si mantengono paralleli fra loro al cambiare della tensione di alimentazione. Coppia e Numero di giri crescono linearmente con il voltaggio. Conseguentemente anche la corrente cresce linearmente: il suo segmento si allunga o accorcia mantenendo la stessa inclinazione rispetto agli assi cartesiani:
Resistenza interna delle batterie di alimentazione.
Passando dalle celle AAA NiCd alle PoLy la differente resistenza interna degli accumulatori cambia le curve del motore: aumenta la corrente assorbita, aumentano coppia e numero di giri:

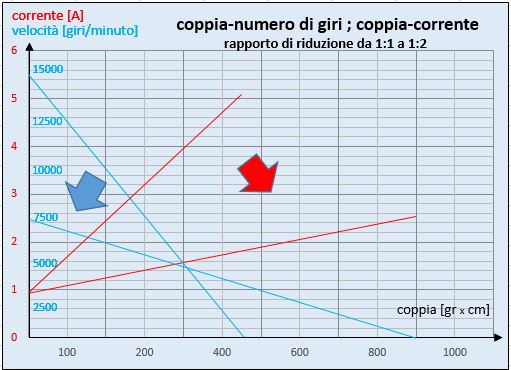
Rapporto di riduzione.
E' intuitivo: un motore ridotto "gira" più lento ma ha più "forza" e consuma meno a parità di carico resistente. In pratica i due segmenti si "sdraiano":
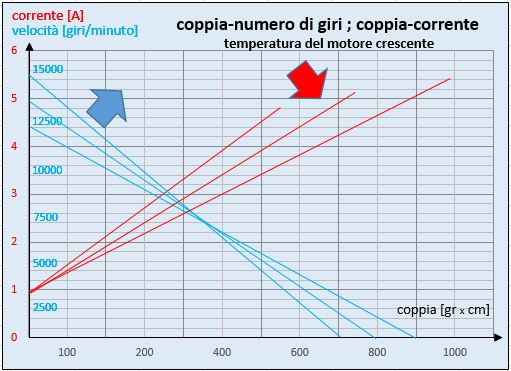
Temperatura.
Più il motore si scalda più il motore "gira" veloce, consuma meno e perde coppia. In relazione al carico all'albero, il fenomeno è più o meno critico, ma normalmente è il carico elevato che fa innalzare la temperatura del motore: si arriva quindi a non avere più un motore in grado di erogare la coppia necessaria. Per questo serve raffreddarli!
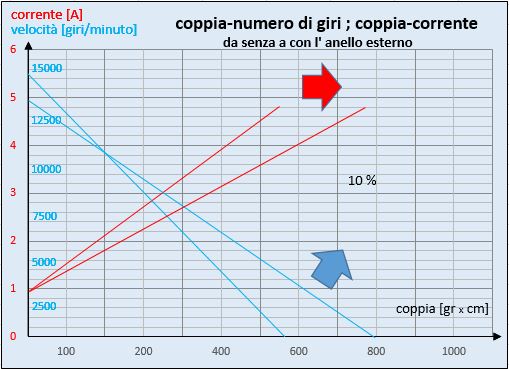
Anello limitatore di flusso.
l' anello in materiale ferromagnetico evita la dispersione del campo prodotto dai magneti permanenti: conseguentemente il numero di giri diminuisce ma aumenta la coppia erogata e la corrente assorbita:
Conclusioni.
Come abbiamo visto sono molteplici i fattori che influenzano le prestazioni del motore elettrico.
Dando per scontato che dimensioni geometriche, numero di giri e coppia siano dati "imposti" dal modello, noi possiamo concentrarci su tutte le altre grandezze modificabili facilmente:
- tensione di alimentazione: se possibile meglio utilizzare tensioni elevate. A parità di potenza erogata un motore da 6 volt consuma 4 volte un motore da 12 volt. Poichè la capacità della batteria dimezza al raddoppiare del voltaggio, sempre mantendo costante il volume e il peso delle batterie a confronto, ne risulta che complessivamente l' autonomia del modello raddoppia.
- raffreddamento: per evitare di bruciare il motore o semplicemte per avere delle caratteristiche costanti, sarebbe sempre consigliato installarlo, soprattutto se si riscontra sperimentalmente che la temperatura d' esercizio supera i 60-65^C.
- batterie a bassa resistenza interna: cioè PoLy! Non solo per l' andamento dei segmentini, ma soprattutto per la curva di scarica più costante e regolare. Il peso risparmiato poi ci permette di zavorrare la chiglia o di mettere più batterie.